在自己机器的Ubuntu系统,如何连接到远程机器人服务器,首先我们要保证自己的Ubuntu已经装有ros,如果没有请参照这篇文章安装,安装完成后按照下面步骤进行。
1,ip和网络通信检测
首先确保自己机器连接到机器人服务器的wifi,确认本机可以访问远程机器。1
$ ping 192.168.10.11 #远程机器ip
如下图表示可以正常通信。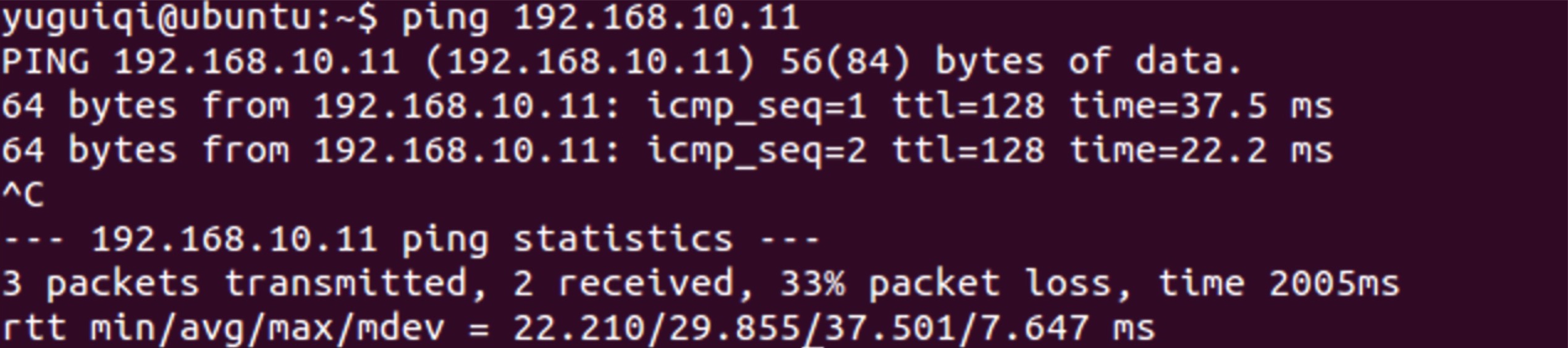
然后查看本机ip。1
$ ifconfig
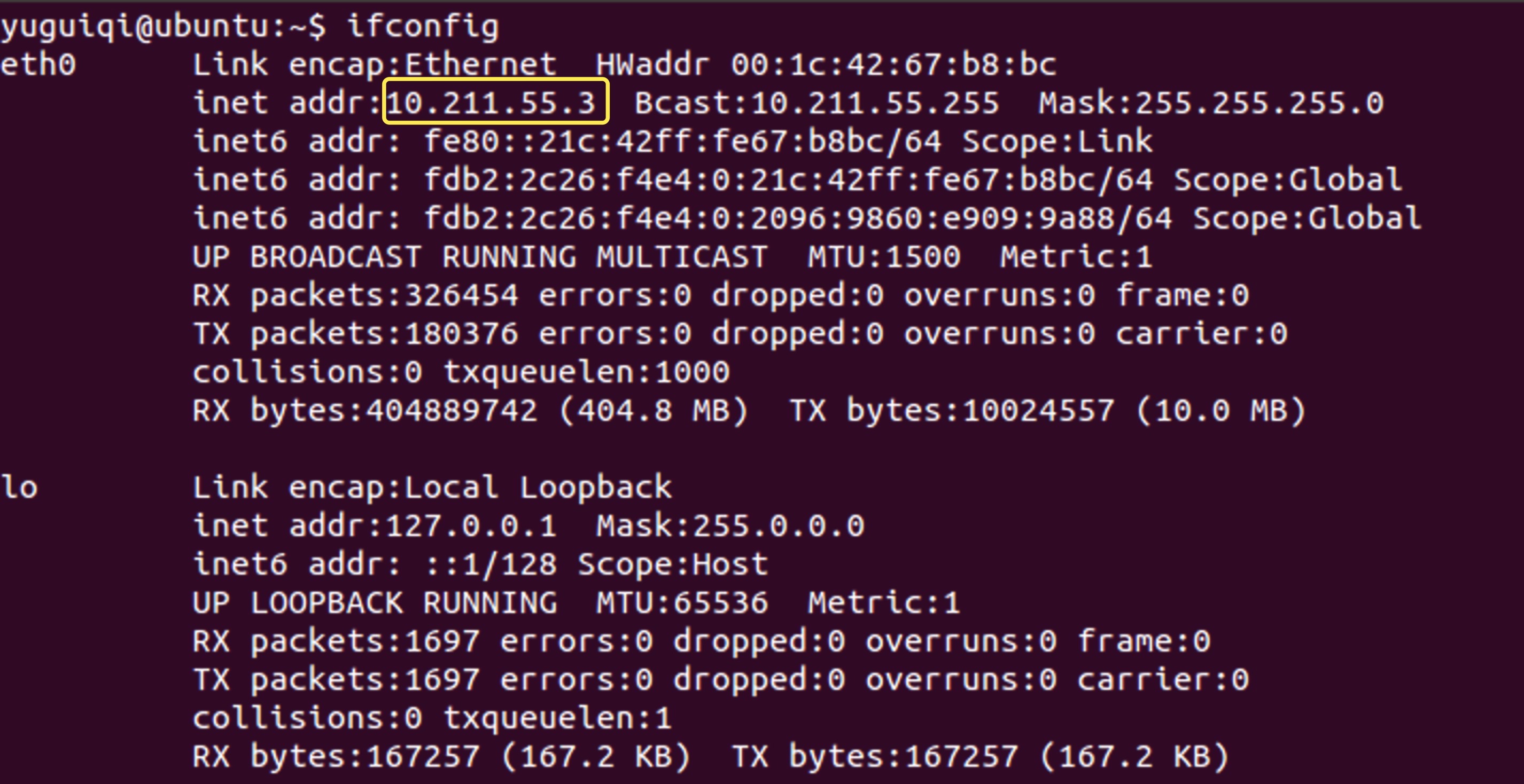
查看到本机的ip,这个ip复制下来方便后续的配置。
2,配置.bashrc文件
1 | $ sudo gedit ~/.bashrc #用gedit命令打开.bashrc文件 |
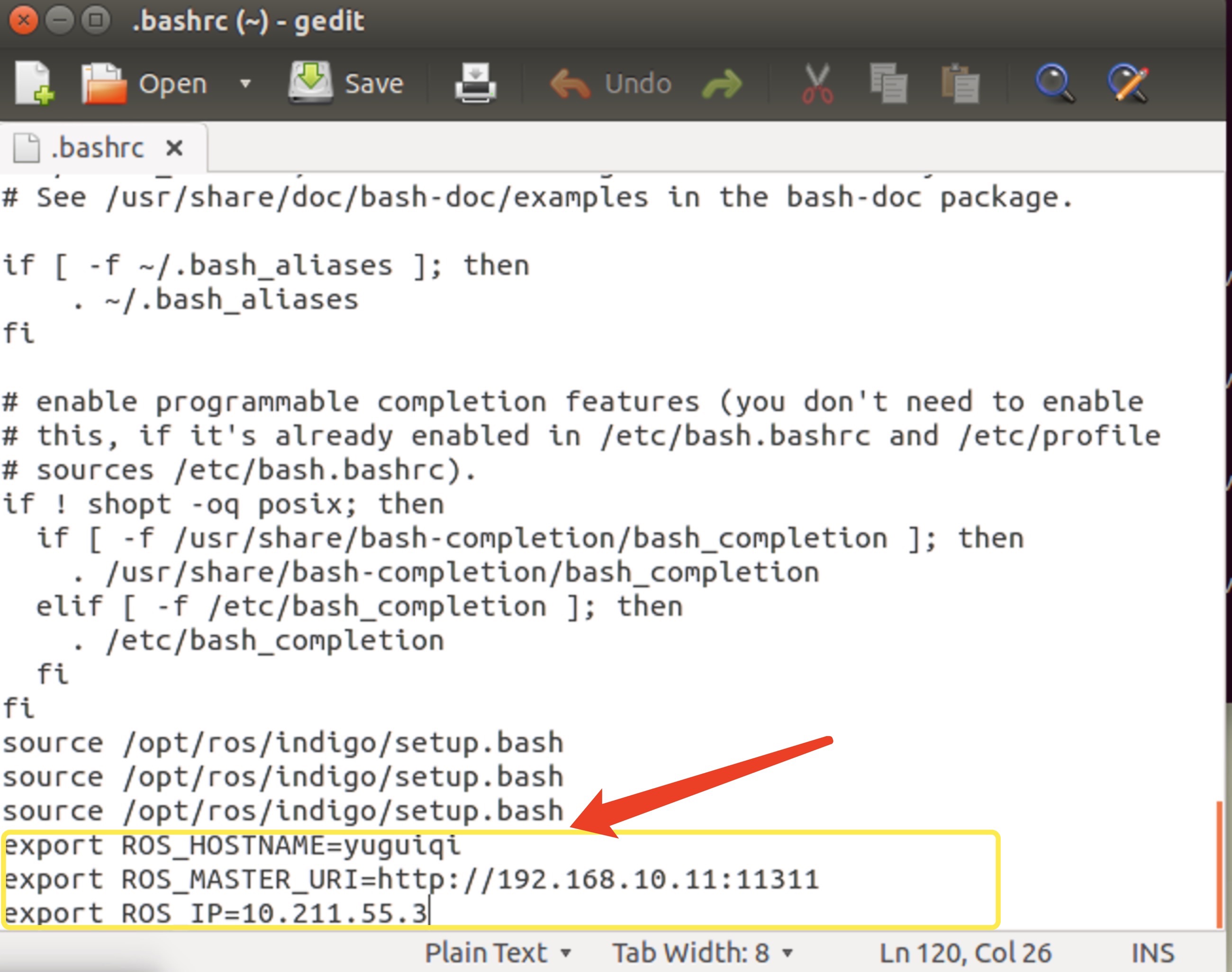
在文件最后添加下面3行内容,位置如图:1
2
3export ROS_HOSTNAME=[本机hostname]
export ROS_MASTER_URI=http://[目标主机IP]:11311
export ROS_IP= [本机的IP]
添加后保存关闭即可。
然后让文件重新生效。1
$ source ~/.bashrc #让文件重新生效
3,打开rviz连接远程
首先保证本机有higgsnavi.rviz文件,如果没有可以下载,
下载后放到自己的用户目录下即可,这样方便使用。
然后打开命令行启动rviz。1
$ rviz -d higgsnavi.rviz #启动rviz
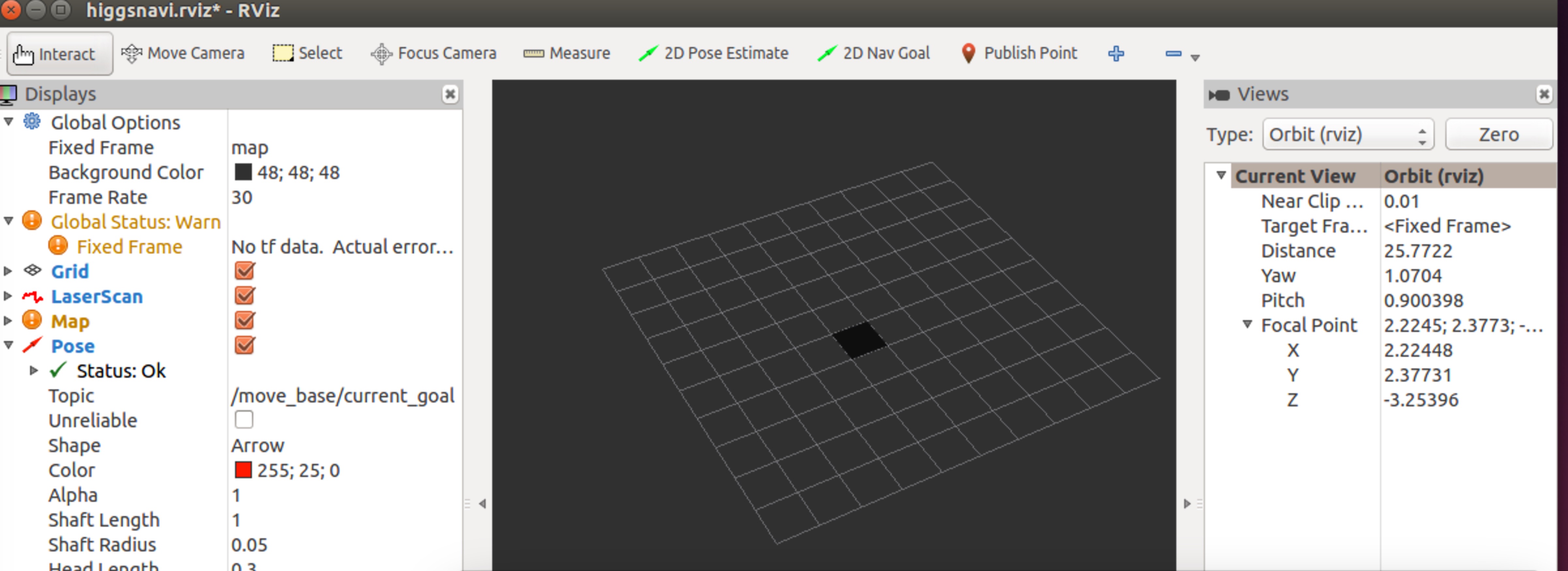
出现下面效果表示正常启动。
下面是启动后完成的界面,新手不要随便操作上面按钮内容,以免对远程机器已有内容影响。